股関節手術後の四次元動作解析システムの開発
4.動作時における股関節の動態解析
4.1 骨格の半透明表示
股関節の動態解析を行う際に必要な最も基本的な機能として、骨格の半透明表示を行なった。これにより、人工股関節とその周辺骨の状況を容易に把握することが可能となり、様々な解析結果(例えば脱臼の危険肢位についての指導など)を説明する時の助けになるものと考える。
4.2 股関節角度の計測
人工関節全置換術後の患者の動作を解析するにあたり、股関節の可動範囲というものが重要な要素の一つとなる。そこで、モーション キャプチャによって得られた動作データから、動作時の対象患者の股関節角度を計測した。
三次元空間上での2つの座標系同士の角度を表現する方法としては、工学分野においてはオイラー角やロール・ピッチ・ヨー角など様々な方法が用いられているが、整形外科学分野で特に股関節領域では一般的に屈曲/伸展角、外転/内転角、外旋/内旋角の3つのパラメータが用いられる。ここでは股関節の場合に関してそれぞれの角度パラメータについて説明する。屈曲/伸展角は大腿骨軸(大腿骨の長軸)を矢状面(身体を左右に分ける平面)上に投影した際の骨盤座標系に対する角度、外転/内転角は大腿骨軸を前額面(身体を前後に分ける平面)上に投影した際の骨盤座標系に対する角度、外旋/内旋角は大腿骨軸を中心とする回転角度である。
本研究ではこれら3つのパラメータの時間的変化をグラフで表現した。これによって、動作時の股関節角度を定量的に知ることができる。
4.3 オブジェクト同士の干渉判定
股関節駆動時の骨盤と大腿骨、あるいは人工股関節などといったオブジェクト同士の干渉判定を行うことにより、脱臼の要因である衝突の予測を可能とした。
人工股関節が脱臼する際には股関節周辺の骨格、人工関節のいずれかの部位が互いに接触し合いその部分を支点としてhingemotionが起こり脱臼すると考えられる。そこで、患者動作時の骨格や人工関節の接触を検出し、警告として表示することで、危険肢位の予測を行う、などといったことが可能となった。
本モデルにおいては骨盤のポリゴン数が約5万、大腿骨のポリゴン数が約2万というように非常に多くのポリゴンが使われており、このようなオブジェクト同士の干渉判定をリアルタイムに行うためには演算量を減らす工夫が必要となる。
具体的には、CADなどの分野で主に用いられているBounding Box法[2]と呼ばれる方法を用いた。この方法は、各ポリゴンの外接直方体を考え、近傍の直方体同士を順順にまとめていくことにより、一つのオブジェクトを大きな一つの木の構造として管理する。
干渉判定を行う際にはまず、このオブジェクトの木の幹となる直方体同士の干渉を判定し、この直方体同士が干渉をしていればこの幹の枝となる直方体同士の干渉判定を行う。以上の操作を再帰的に繰り返すことにより、干渉しているポリゴンを検出することが可能となる。
4.4 人工股関節摺動面における動作時摺動距離の評価
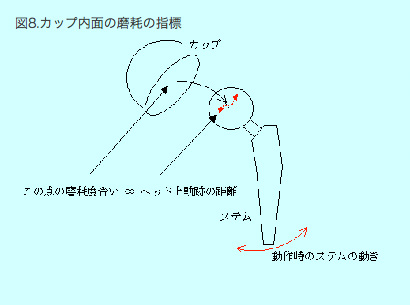
人工股関節全置換術後において術後経過を評価するにあたり、股関節摺動面の磨耗の程度が重要な評価項目である。磨耗に影響を与える要素として摺動面においてカップ内面とヘッドとのこすれる頻度が重要である。
そこで、本システムにおいてカップの磨耗予測を行う一つの方法として、カップとヘッドとがこすれた距離を定量的に計測する方法を開発した。この方法は、図8に示すような方法である。まず、カップ内面のある一点がヘッド上をどれだけの距離移動したのかを計測する。この移動距離はカップ内面のこの点がヘッドとどれだけこすれたか、というこすれ度合いを表しているため、この点の磨耗の度合いを表す一つの指標と考えることができる。そこで、同様の操作をカップ上の全ての点に関して行ない、各点での移動距離を比べることで周囲の点に比べてどの点が高頻度に磨耗するのかを評価することができる。本システムでは、この磨耗の度合いの分布を容易に認識することができるように、カップの内面に磨耗度合いに応じた色情報をマッピングした。