股関節手術後の四次元動作解析システムの開発
3.患者のモーションキャプチャデータによる骨格モデルの駆動
患者の動作解析を行うために、術後CTより作成した三次元骨格モデルを対象患者のモーションキャプチャデータをもとに駆動した。モーションキャプチャの方法について以下に示す。
3.1モーションキャプチャシステムの概要
本研究では光学式三次元位置計測システム(英国 Oxford Metrics社製 VICON 512(商標))を用いてモーションキャプチャを行った。このシステムは、人体の各部に貼付した赤外線反射マーカーに照明し、数台のCCDカメラによって撮影することによってマーカーの三次元的な位置座標を計測するシステムである。最高240Hzという高いサンプリングレートでの計測が可能であり、高速な動作にも対応可能である。
3.2 体表面マーカーの貼付部位
本研究で使用した体表面マーカーは全部で15個である。貼付した部位の詳細を図5に、マーカー番号と解剖学的な部位名との対応を表1にそれぞれ示す。
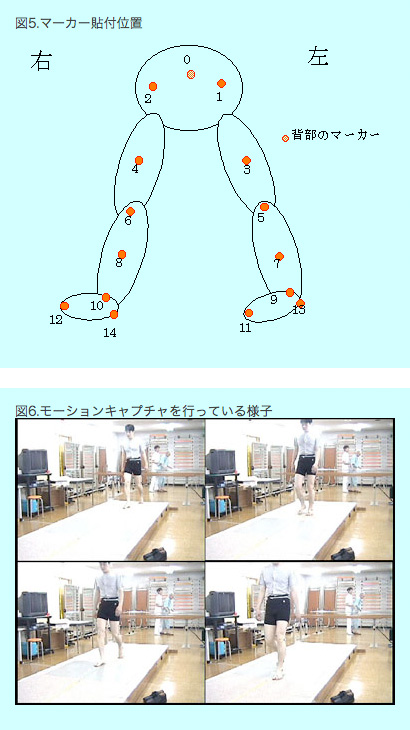
表1.マーカー番号と解剖学的な部位名との対応
| マーカー番号 | 部位名 | マーカー番号 | 部位名 | マーカー番号 | 部位名 |
|---|---|---|---|---|---|
| 0 | 左右の上後腸骨棘の間 | 1 | 左上前腸骨棘 | 2 | 右上前腸骨 |
| 3 | 左大腿部 | 4 | 右大腿部 | 5 | 左膝外顆 |
| 6 | 右膝外顆 | 7 | 左下腿部 | 8 | 右下腿部 |
| 9 | 左外果 | 10 | 右外果 | 11 | 左第2中足骨頭 |
| 12 | 右第2中足骨頭 | 13 | 左かかと | 14 | 右かかと |
3.3 モーション キャプチャによる動作計測
VICON512 システムにより、実際に歩行動作を計測している様子を図6に示す。本研究ではサンプリングレート60Hz とし、6台の天井固定型CCDカメラによって動作を計測した。
3.4 モーションキャプチャデータからの関節角度の計算
モーションキャプチャデータから得られる情報は体表面に付けたマーカーの三次元的な位置の変化である。このため、骨格を追従させた かたちで動作させるためにはマーカーの位置情報から関節角度を計算しなければならない。
本研究ではまずモーションキャプチャを行う際に貼付するマーカー位置をCT画像上で取得することを可能とするため、CT撮影時にマーカー位置にゴルフのピンによってマークを行い、撮影を行った。ここで得られるCTデータよりマーカーの位置と骨格との相対的な位置関係を取得した。その後、"動作時においてもマーカー位置と骨格との相対的な位置関係に変化はない"という仮定のもとにモーションキャプチャにより得られたマーカー位置情報から骨格位置を計算し、骨格同士の連結部分における関節角度を計算した。股関節角度の計算を例にとり、計算方法の詳細を説明する。
まず、人体モデルの座標系(以下モデル座標系と表す)上での骨盤に付けた3点のマーカーの位置座標をCTデータから取得し、この3点によって定められる座標系Σpe1を決定する(座標系の決め方、座標軸の順番は任意)。また、Σpe1上での股関節中心(骨頭中心)H pe1をモデルから求め、この点と大腿骨につけた2点のマーカーとの3点によって定められる座標系Σfe1をモデル座標系上で定める。次に、モーションキャプチャデータの座標系(以下キャプチャ座標系と表す)上での骨盤に付けた3点のマーカーの位置座標からΣpe1を定めた方法と同様の方法で座標系 Σpe2を決定する。Σpe2で表したH pe1の位置をH pe2と表すと、H pe2はキャプチャ座標系上での股関節中心の位置となる。また、同様にH pe2と大腿骨に付けた2点のマーカーのキャプチャ座標系上での位置からΣfe2を求める。図7にこれらの座標系の関係を示す。
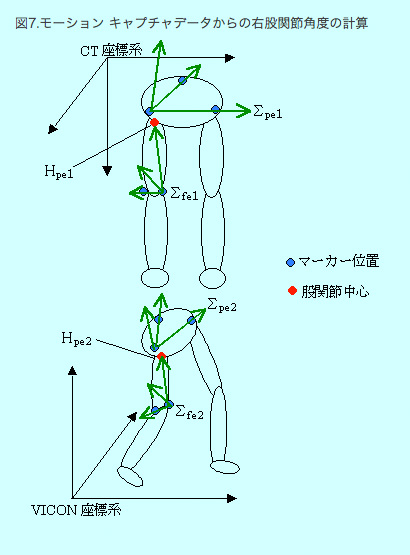
以上のような方法で求めた座標系Σpe2とΣfe2との角度が股関節角度となる。ただし、この方法では、先にも述べたように、動作時においてもマーカーの位置と骨格位置との相対的な位置関係がCT撮影時(三次元骨格モデル作成時)と変化していない、ということを仮定している。実際には動作時には骨格と皮膚の間でのずれが生じるため、誤差が生じる可能性がある。